News
BBVA Award
Prof. Kruse was a member of the Jury for the prestigeous BBVA award.
Im Juni 2025 fand wieder die Verleihung der BBVA Foundation Awards in Bilbao vor großem Publikum statt. Prof. Kruse gehörte wieder zur Jury. Die Jury mit einem Preisträger Jordan (Dritter von rechts, der hat z.B. Lernverfahren für Bayes‘sche Netze entwickelt). Der zweite Preisträger Jain hat Methoden zur fingerprint recognition entwickelt, nicht auf dem Foto.

Laudatio: The BBVA Foundation has granted its Frontiers of Knowledge Award in Information and Communication Technologies to Anil K. Jain (Michigan State University, United States) and Michael I. Jordan (University of California, Berkeley, United States) (400000 Euro) for their “core contributions” to machine learning, which have unlocked developments in biometrics and artificial intelligence.
Sanaz as the Bundes Jury at JugendForscht 2025
Sanaz has been a member of the Bundes Jury for JudendForscht which took place from 30 May to 1 June in Hamburg.


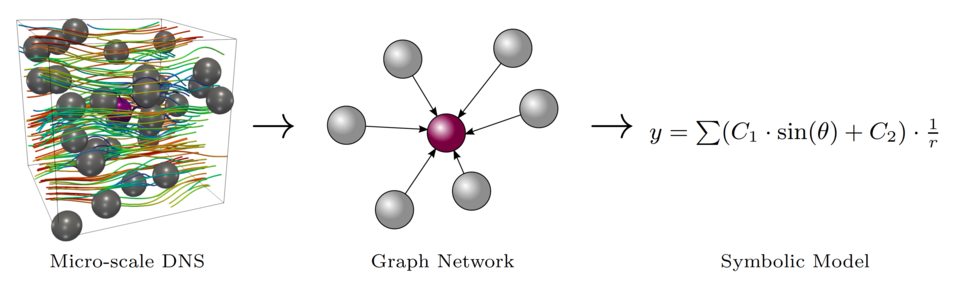
Julia Reuter PhD Defense
Julia successfully defended her PhD Thesis with the title:
Development of Symbolic Models Using Genetic Programming and Domain Knowledge


Rachel's farewell party
It was a great pleasure to work with Rachel for almost a year. As a Postdoc she supported us to do research on data analytics for medical and behavioral data.

New EFRE Project: MetaSwarmX
We just launched the project website for our new EFRE project MetaSwarmX. Check it out!
The project was approved with a funding period of October 2024–December 2027 and its full title is "MetaSwarmX: Meta-Domain Schwarmtechnologie für intelligente und plattformübergreifende Produktion der Zukunft". In January 2025, the first members started working on the project.

Plenary Talk at IEEE SSCI 2025
Sanaz gave a plenary talk with the title Human-Centric Multi-Objective Optimization and Decision-Making for Sustainable Mobility
at 2025 IEEE Symposium Series on Computational Intelligence, Trondheim, Norway. More Information https://ieee-ssci.org/?ui=plenary-and-keynote-sessions.
Qihao's Defense
Qihao sucessfully defended his PhD Thesis with the title:
Multi-Criteria Study of Collective Swarm Decision Making in Large Decision Spaces




Happy Holidays
We wish you a merry Christmas and happy holidays.

New DFG Project
Our successful DFG project with colleagues from process engineering receives further funding for the 2nd phase.
Project title: Improving the simulation of large-scale dense, particle-laden flows with machine learning: a genetic programming approach.
Duration: 2nd phase January 2025 - December 2027
Research Retreat 2024
PhD presentations, a social event and a visit at Fraunhofer IVI in Dresden were the program points for our research retreat 2024.


10 year CI Chair
We are very excited to celebrate the 10th anniversary of the CI Chair in 2024. To mark the occasion, we have created a brochure about the scientists at the Chair. Take a closer look:

Max Weber Programm 2024
Sanaz gave a two-week lecture on "the science of decision-making" at the Summer Academy (Sommerakademie) of the Max Weber Programm which is part of the Studienstiftung. It was truely a great pleasure to work with such talented young students for two weeks.

RoboCup WorldCup 2024
Our team got the second place at the worldCup 2024 which took place in Einhoven :) Congratulations!!!

Aim-FarmRob First Field Test
Today, the Aim-FarmRob team did a first real-world test of their agricultural robot on an actual field.
The smaller of the two prototypes, named “Cyrus” (after Cyrus McCormick, a famous inventor of agriculture machinery), went on its first journey out into the wild. The software worked flawlessly, as the simulation predicted. However, on the field, the team discovered that the uneven surface of the field overloaded the stall torque of the motors controlling the steering. Consequently, the steering system of the robots needs to be slightly redesigned to provide more torque. The team is eager to come back and aims to conquer their field in August.
IEEE WCCI 2024
We are attending IEEE WCCI 2024 in Yokohama, Japan and presented 5 Papers:
- Tomoya Hömberg, Sanaz Mostaghim, Satoru Hiwa, Tomoyuki Hiroyasu, Optimized Drug Design using Multi-Objective Evolutionary Algorithms with SELFIES
- Saiful Islam, Sanaz Mostaghi, Michael Hartmann, A Survey on Multi-Objective Optimization in Microgrid Systems
- Lukas Bostelmann-Arp, Christoph Steup and Sanaz Mostaghim, Free-Form Coverage Path Planning of Quadcopter Swarms for Search and Rescue Missions using Multi-Objective Optimization
- Boris Djartov, Sanaz Mostaghim, Anne Papenfuss and Mathias Wies, A Learning Classifier System Approach to Time-Critical Decision-Making in Dynamic Alternate Airport Selection
- Markus Rothkötter, Niklas Kluge and Sanaz Mostaghim, Application of a Bi-objective EA for RAN Resources Optimization in a Dynamic Scenario


Public lecture at IEEE World Congress on Computational Intelligence
Sanaz gave a public lecture at the IEEE World Congress on Compuettaional Intelligence which took place in Yokohama, Japan.
Prof. Kruse as a Jury of BBVA Award
Im Juni fand in Bilbao die Verleihung des BBVA Foundation of Knowledge Award statt. Herr Professor Kruse war zum 12ten Mal Mitglied der siebenköpfigen internationalen Jury. Den diesjährigen Gewinner des mit 400.000 Euro dotierten Preises ist Takeo Kanade https://www.frontiersofknowledgeawards-fbbva.es/noticias/frontiers-of-knowledge-award-16th-edition-information-communication-technologies/

Human Swarm 2024
Thanks for attending the Human Swarm event 2024. Here are some of the results. Altogether 120 participated in the swarm.
Statistics:
Colors: 32 Blue, 30 Pink, 29 Yellow and 29 Green
Shapes: 35 Square, 23 Triangles, 18 Pentagon and 44 Circles
Task 1: Collective Perception - Color (Which color is in majority?)
The swarm converged to green - Not correct (This could be because the two colors yellow and green were very similar).
Task 2: Collective perception - Shape (Which shape is in majority?)
The swarm converged to circle - Correct
Task 3: Sorting the colors
Task 4: Sorting the shapes
Task 5: Sorting the numbers
Task 6: Scrabble: Very long words are built.
More analysis and videos will follow soon.
If you are interested to read more, you can refer to our article:
- Sanaz Mostaghim and Sebastian Mai
- Kooperation mittels Schwarmintelligenz
- In Haux R, Gahl K, Jipp M, Kruse R, Richter O, Herausgeber. Zusammenwirken von natürlicher und künstlicher Intelligenz. Pages 55-69, Wiesbaden: Springer VS; 2021 --> https://link.springer.com/chapter/10.1007/978-3-658-30882-7_5
Here is the first video:
Fraunhofer IVI
Besides her professorship and her position as the head of the chair of Computational Intelligence, Sanaz is the new Institute Director at Fraunhofer IVI (Institute for Transportation and Infrastructure Systems).

Sanaz in Bundesjury for Jugendforscht
Sanaz was a member of the Bundesjury of JugendForscht Competitions, which took place from May 30 to June 2 in Heilbronn, Germany.

Picture: Left to right - Rüdiger Grimm (Bundesjury), Christine Regitz, Präsidentin der Gesellschaft für Informatik, Prof. Christel Baier (Bundesjury), Prof. Sanaz Mostaghim (Bundesjury)